May the Force Work With You
MAY THE FORCE WORK WITH YOU
A Semi-Technical Look at Why Motorcycles Don’t (Or Do) Fall Over in the Corners
Lane Campbell
There’s something funny about us bikers. Point a rider down a swoopy, swervy road, and if it’s just the right kind of road, even the stodgiest full-dress tourer will wick it up, just a bit. It’s subconscious, it’s subliminal, it’s something we all know: Cornering a motorcycle is just plain bugs-in-the-teeth fun.
Carried to extremes, sure, it’s dangerous. We know that, we repeat it over and over. Yet the temptation to boogie is always there, simmering. We like to lean it over until something drags. To do it better, we must know something about cornering force, how tires generate it, and how the requirement for it varies with speed, load, and curvature.
Isaac Newton gave us the basic tools we need—his laws of motion. Remember? Unless acted upon by some force, an object at rest remains at rest and an object in motion continues in motion in a straight line and at constant speed. Repeat. A straight line. To travel in a curved line, then, an object must always be subject to some force.
Newton’s next law went something like this: Any object acted upon by a force will accelerate in the direction of the force. How hard it accelerates is proportional to the amount of force and the object’s mass. Sitting on the ground, in Earth’s gravitational field, we can substitute “weight” for “mass” without getting into too much trouble ... as long as we keep the units of measure straight.
Next, travel in a circular path at constant speed requires an acceleration at right angles to the object’s path, always pointing in toward the center of the circle. Remember, that’s at constant speed. Slowing down or speeding up introduces other forces and accelerations into the picture. Let’s keep it simple for now.
If our object is a motorcycle traveling in a circular curve (i.e., a curve that is the arc of a circle) at a constant speed, it requires a certain lateral acceleration, always at right angles to its path. As the bike moves along its path, the direction of this acceleration changes with it; for it is always the same with respect to the bike—at right angles, pressing inward toward the curve’s center.
The amount of this acceleration is independent of the bike’s weight. It depends only on the speed and the radius of curvature of its path. There’s a formula for it:
“V” is the velocity (or speed along the path) and “r” is the radius. If we measure speed in feet-per-second (ft./sec.) and radius in feet, “a” will come out in feet-persecond-per-second (ft./sec.2). That’s an appropriate measure for acceleration if you’re an engineer; but it’s easier to fiddle with if we reduce it to g’s, which are multiples of the acceleration of gravity. Then our formula becomes:
Want some typical numbers? OK, 60 mph is about 88 ft./sec., so 30 mph is 44 ft./sec. Ride at 44 ft./sec. into a curve of 100 feet radius, and it will take an acceleration of 0.6g to hold you in. If you cut the radius in half, to 50 ft., the required acceleration would double, to 1.2g. If you doubled V, however, your required g force would quadruple—because V is squared. That means required g force is going to vary drastically with speed.
This, so far, just confirms what we already knew from experience. Speed up, you need more lateral acceleration. Tighten your line (to a smaller radius) and you also need more.
Now, how does lateral acceleration translate into cornering force? Good of Newton to the rescue—force and acceleration are proportional to each other. That means for our motorcycle to corner (i.e., develop lateral acceleration) there must be a force pressing it inward in the same direction as the lateral acceleration.
This force does vary with weight, which begins to explain why we’ve converted lateral acceleration to g's. To accelerate at one g ( 1.0g), there must be a force, equal to the object’s weight, pointed in the desired direction.
Let’s say you and your bike together weigh 600 lb. Cornering at l.Og, you need 600 lb. cornering thrust. At 0.5g, you only need 300 lb.; at 0.75g, 450 lb., and so on. Expressing lateral acceleration in g’s allows you to figure cornering force in simple multiples of the vehicle’s weight.
It almost goes without saying where this required cornering force has got to come from—your tires. They are your sole link with the ground and it’s their ability to generate lateral thrust that keeps you one step away from disaster.
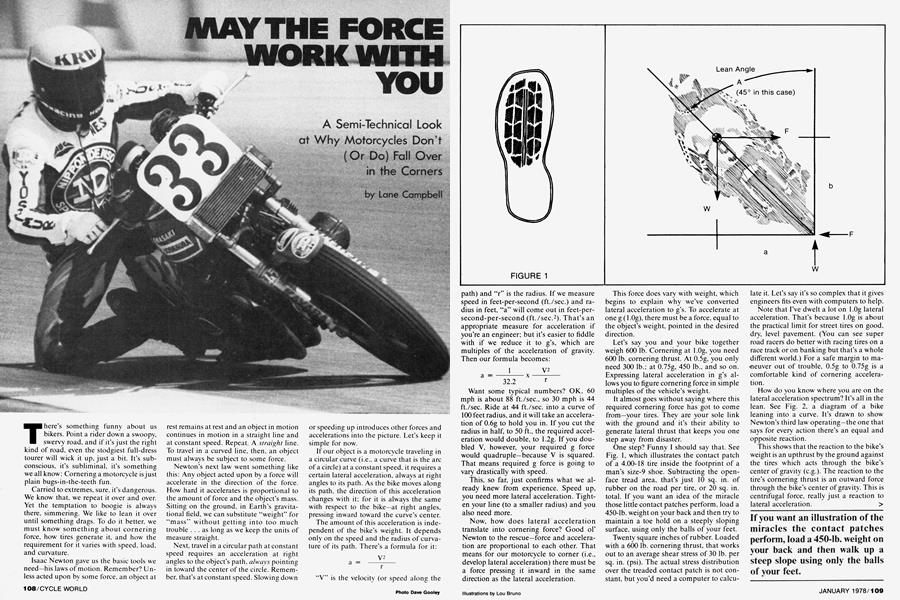
One step? Funny I should say that. See Fig. 1, which illustrates the contact patch of a 4.00-18 tire inside the footprint of a man’s size-9 shoe. Subtracting the openface tread area, that’s just 10 sq. in. of rubber on the road per tire, or 20 sq. in. total. If you want an idea of the miracle those little contact patches perform, load a 450-lb. weight on your back and then try to maintain a toe hold on a steeply sloping surface, using only the balls of your feet.
Twenty square inches of rubber. Loaded with a 600 lb. cornering thrust, that works out to an average shear stress of 30 lb. per sq. in. (psi). The actual stress distribution over the treaded contact patch is not constant, but you’d need a computer to calculate it. Let’s say it’s so complex that it gives engineers fits even with computers to help.
Note that I’ve dwelt a lot on l.Og lateral acceleration. That’s because l.Og is about the practical limit for street tires on good, dry, level pavement. (You can see super road racers do better with racing tires on a race track or on banking but that’s a whole different world.) For a safe margin to maneuver out of trouble, 0.5g to 0.75g is a comfortable kind of cornering acceleration.
How do you know where you are on the lateral acceleration spectrum? It’s all in the lean. See Fig. 2, a diagram of a bike leaning into a curve. It’s drawn to show Newton’s third law operating—the one that says for every action there’s an equal and opposite reaction.
This shows that the reaction to the bike’s weight is an upthrust by the ground against the tires which acts through the bike’s center of gravity (c.g.). The reaction to the tire’s cornering thrust is an outward force through the bike’s center of gravity. This is centrifugal force, really just a reaction to lateral acceleration. >
The effect of these forces (or couples, as they’re often called) is a set of torques (twists) about the tire’s contact patch. If the torque from “W” (weight) is greater than the torque from “F” (centrifugal force), the bike will fall down. If it’s vice versa, the bike will high-side. If and only if the torques are equal, the man-machine team will stay in a stable cornering attitude.
How do you figure a torque? It’s the force, multiplied by its moment arm (the distances represented by a and b in the figure). To illustrate, here’s another reason to dwell on l.Og cornering. At l.Og, by definition, F has to equal W. Then the torques (F x b, and W x a) are equal only if a equals b. What have you got? A 45-deg. right triangle, that’s what! One g cornering always means the man-machine c.g. is on a line running from the contact patch out 45 deg. from vertical.
Hmm, you say. That’s neat, but what about other lateral accelerations? For that you need trig tables. The reasons take mathematical proof (I won’t belabor you with that); the lateral acceleration in g’s is always equal to the tangent of the angle of lean. For example, 0.75g, reading the trig tables, comes out to just under 37 deg.
While we’re on this subject of lean angle vs acceleration, let’s talk about ground clearance. Suppose you’ve got a bike like the wide-case Four with bulky exhaust system in Fig. 3. It starts to drag things at 37 deg. of lean. Does that mean that it is forever limited to 0.75g or less? Only if the rider stays put, tucked in along the bike’s centerline. If he hangs off to the inside far enough, he can shift the combined manmachine c.g. to a line at 45 deg. from vertical. By doing that, he can then push it to one g.
Now you know why guys who race huge Fours clamber about like monkeys on the back of a water buffalo, and why the guy on the narrow-case Single or V-Twin can stay put, merely twitching a knee out and in occasionally as he corners.
So far, we’ve gotten a handle on how much you need, and whether or not your bike will tend to get in your way. How tires develop that vital thrust is still a complex, little-understood subject.
Tires maintain a friction contact with the road. They also distort under sideloading, developing varying amounts of cornering thrust according to the demands placed on them. First off, the kind of friction we’re most concerned about with tires is static friction, as opposed to sliding friction. This is because the cornering road rider is (we hope) maintaining rolling contact, not sliding contact, with the road.
Static friction determines the ultimate amount of cornering thrust a rider can expect before his tires start sliding. Since the coefficient of static friction is generally greater than the coefficient of sliding friction, the onset of sliding means a significant loss of precious cornering thrust to the motorcyclist. It takes a very special rider, mounted on very good rubber, to deal with this as an everyday matter. For most of us, the basics of rolling friction are more than enough.
In the preceding paragraph, I used a term—coefficient of friction—without defining it. Coefficient of friction, often symbolized by the Greek letter mu (/i), is a dimensionless ratio. To visualize mu, take any two rubbing objects (like tire tread and road) and visualize the junction between them. They are being pressed together by a normal force “N” (always taken as perpendicular to the rubbing surface). There is a maximum force, in the direction of sliding, that the junction will transmit before sliding occurs. Let’s say as an example that the maximum force is 5 lb. If you shove on one object with anything less than 5 lb., the object will stay put. It won’t slide. Shove just one iota harder than 5 lb., and it will begin to slide. If the normal force N pressing the two objects together was 10 lb., then the coefficient of static friction between the two objects is 0.5. The mu number is a ratio of the limiting frictional force divided by the normal force. That number is taken as a constant for any given pair of objects, or any given pair of substances placed together. Our example had a mu of 0.5, so if N was doubled to 20 lb., then it would take a force of 10 lb. to get the objects sliding.
Getting back to tires, mu is affected by many things. The tread rubber compound is one of them. Road surface is another, and one which is always changing. Maximum mu is going to occur between good rubber and dry, slightly grainy pavement. Between rubber and paint stripes, it’s a different number. Between rubber and wet leaves, it’s still another (lower) number.
The normal force on level pavement is simply weight of bike and rider pressing down on the tires. Then the maximum cornering thrust available, for any given road surface, is some fraction of the bike/ rider weight. That fraction is mu static—the coefficient of static friction for that given surface. In practice, for good street tires on dry pavement, a safe figure for mu is 1.0.
If mu equals 1.0, then the limiting frictional force is equal to the man/machine weight, split front to rear according to the weight distribution. Hmm. If maximum thrust equals the man/machine weight, then maximum lateral acceleration associated with mu of 1.0 has got to be l.Og. Which is exactly what was hinted at earlier.
OK, now we have a magic set of numbers associated with 100 percent cornering on dry pavement: Mu equals 1.0 for decent tires; maximum lateral acceleration is 1.0g; and the lean angle is 45 deg. for the man/machine c.g., even if you have to hang off to get it. Still, most people don’t corner at 100 percent—especially on the road. If you encounter a sudden panic situation and you’re already 100-percent committed, what can you do to save yourself? Nada. So most people corner at 50-75 percent and leave a margin of sanity for themselves.
Now we should know how tires develop thrust as they approach that limit. There are two main mechanisms involved. Both of them are based on the fact that air-filled rubber tires must flex under load. If they didn’t, they’d be virtually uncontrollable at speed. (If they flex too much, ditto.)
For car tires, the basic cornering-force mechanism is called a slip angle. Car tires are supposed to run straight up-and-down, so camber change (lean) is deliberately held to a minimum. In practice, it’s treated as nil. Not so for the bike tire, which must tolerate at least a 45-deg. camber change in either direction. The kind of thrust associated totally with camber is called, oddly enough, camber thrust.
Camber thrust is the main mechanism associated with cornering power in motorcycles, so we’d better try to get a better understanding of it, although the understanding won’t come easily.
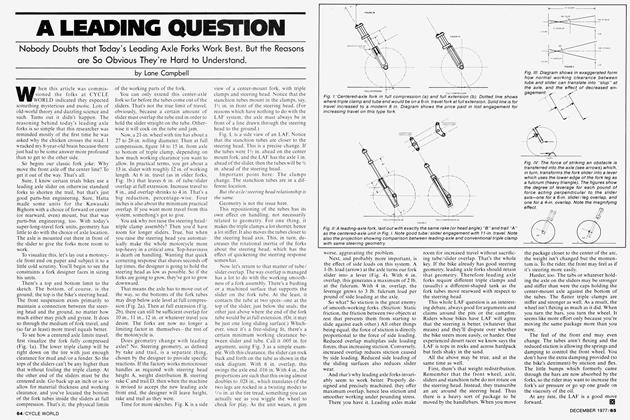
All types of cornering thrust are influenced by the fact that an air-filled tire flexes. In fact, the tire is a kind of air spring that manages to deform in several directions. Running straight up, the tire flattens at the contact patch. Because of this deformation from a true circle, each piece of the tread exerts a force on the pavement as the rolling tire slaps it down. Because the tire is straight up, the many little forces add up to a balanced force that’s in the same plane as the rolling plane of the tire (represented by the centerline in Fig. 4). This adds up to a vertical force, with a bit of a drag component.
However, when the tire is laid over, things happen a little differently. The tire contact patch rolls off-center as the tire is banked over; yet each piece of tread is still being carried around as the tire rolls and is slapped against the pavement. But, now that the tire is banked off vertical, there’s a horizontal component to each of these little incremental forces as the tire tread deforms from its round-section circular perimeter. The sum of all these little forces, over time, is the camber thrust.
The farther over the tire is banked, the greater the camber thrust. It also varies with tire pressure, vehicle load and tire casing construction. Tire designers spend their working days trying to devise tire carcasses that will yield the biggest, most predictable (hence controllable) camber thrust possible. If you plotted camber thrust, reduced to g’s lateral acceleration for a given load and tire pressure, ideally you’d like the curve to be fairly straight and not wander all over the map. The smoother that curve, the more predictable the tire. A typical such curve, lateral g vs camber (lean) angle appears in Fig. 5 ^s a dotted line. Plotted over it is another curve, representing required lateral g vs camber angle according to the tangent-angle rule discussed earlier.
Right away, you notice that beyond 20 deg. and 0.36g, there is a deficiency between available camber thrust and required g at that angle of lean (for the particular tire charted, a Bridgestone). Obviously, we're able to press beyond that; where does the extra cornering power come from? From slip angles!
Well. That means we’d better know something about slip angles. They’re best understood by first considering the automobile tire, since it works almost totally by means of slip angles.
Being flexible and air-filled, car tires also deform under cornering loads. In this case, however, the contact patch is not only pushed to one side, it also twists slightly. In twisting, its centerline gets out of alignment with the tire’s rolling center plane.
This is critical; the actual rolling path along the road is going to be along the centerline of the contact patch. If, however, the tire is pointing in a different direction (because of deformation) than the contact patch, the tire will appear to be slipping, even though it’s still in perfect rolling (not sliding) contact with the road. Hence the term slip angle—the angle between the tire’s rolling plane and the actual path dictated by the distorted contact patch. (See Fig. 6.)
This same thing happens as the motorcycle tire experiences greater and greater side loading from cornering. It’s harder to diagram, and harder yet to understand, because it’s combined with the non-twisting deformation that creates camber thrust.
You know it happens, as it makes up the deficiency shown in Fig. 5; you can feel it happening as you push your bike hard in a corner. You can feel one end or the other “walking” on you, depending on which tire (front or rear) is the most highly stressed.
As you might expect, lots of things combine to determine which end will walk first: front-rear weight distribution, frontrear tire sizes, front-rear tire pressures, also tread design and casing/sidewall stiffness front and rear. Some combinations of bike and tire (under the subtle influence of where you place your body weight) achieve a perfect balance, in which both ends seem to drift ever so slightly without disturbing your ability to steer or control your line.
Here’s the crunch and the reason for this article:
The difference between riding fast and falling off is simply being able to utilize the cornering force your bike has with the tires fitted and on the surface across which man and machine are going. None of us can learn this from a book. Nor do the guys down at the bike store know as much as they’d like each other to believe. Not even the magazines can give you figures on this one.
Couple years back a reporter (not the author of this article), an experienced street rider and a winning club racer took part in an experiment. Each rode a street motorcycle around a proving ground skid pad. Each was instructed to ride as fast as he felt the bike would safely do.
The reporter, who was just learning how to ride, went ’round at 0.4 g, scared silly. The street rider did 0.5 g and reckoned that was the limit of human skill. The racer turned something like 0.7.
The figures aren’t important. The skid pad was rough and covered with old rubber. Ridden at the limit, the bike did better than an equivalent car, which was the purpose of the experiment.
Listen. Knowing how the cornering force is working for you will make better road riders of us all. Pushing hard without knowing what the bike is signaling is a sure way to ride home in the tow truck ... or worse.
If pushing to the limit starts to become addictive, heed this suggestion:
Get yourself and your go-fast urges out to the track and start racing. You’re ready.
You may even be past due.